LEAP Hand V2 Advanced:
Dexterous, Low-cost Hybrid Rigid-Soft Hand for Robot Learning
Abstract
The human hand is a remarkable feat of biology, with the ability to handle intricate tools with great precision and strength yet softly handle delicate objects. Robot hands attempting to emulate this have often fallen into one of two categories: soft or rigid. Soft hands, while compliant and yielding lack the precision and strength of human hands. Conversely, rigid hands are brittle to bumps and do not conform naturally to their environment. We call our solution LEAP Hand v2, a dexterous, $3000, simple anthropomorphic hybrid rigid-soft hand that bridges this gap. First, it achieves a balance of human-hand-like softness and stiffness via a 3d printed soft exterior combined with a 3d printed internal bone structure. Next, LEAP Hand V2 incorporates two powered articulations in the foldable palm: one spanning the four fingers and another near the thumb—mimicking the essential palm flexibility for human-like grasping. Lastly, LEAP Hand V2 boasts a dexterous Metacarpophalangeal (MCP) kinematic structure, making it highly human-like, easy to assemble, and versatile. Through thorough real-world experiments, we show that LEAP Hand v2 exceeds the capabilities of many existing robot hands for grasping, teleoperated control, and imitation learning. We plan to release 3D printer files and assembly instructions for the dexterous hand research community to use upon acceptance of the paper at our website at https://v2.leaphand.com
Learning from Motion Capture Gloves
Drill Operating
Pouring in the wild
Plate Pickup
Accurate Teleoperation with Gloves
Dining Tray
Hang Shirt
Grape Pluck
*I highly recommend Manus Gloves to take full advantage of the high DOF of LEAP V2 Adv.
Hybrid Rigid-Soft Hand
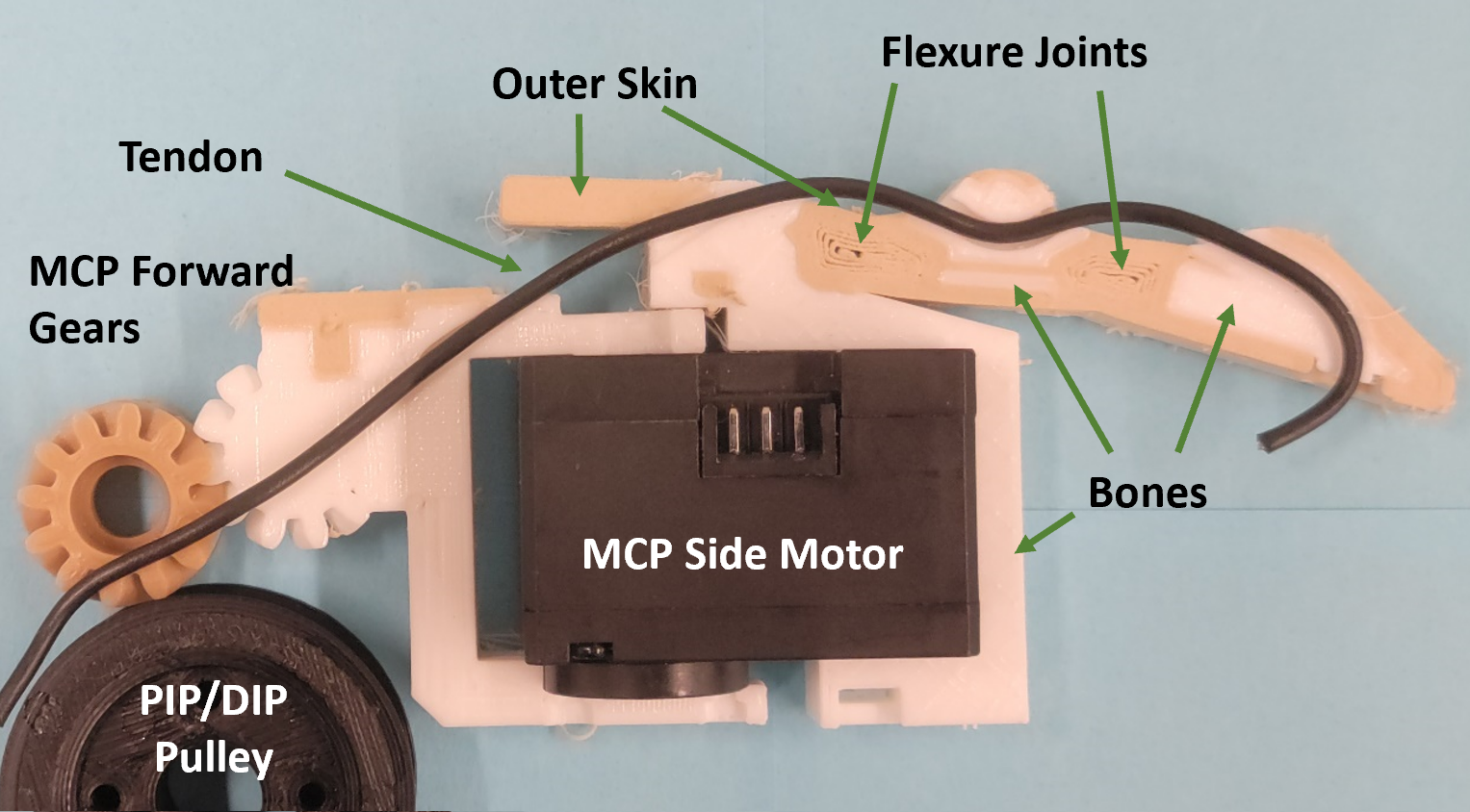
The hybrid rigid-soft design provides both strength and durable compliance.
The MCP joints have a strong rigid structure, while the PIP and DIP joints are coupled via a single tendon.
Each finger is multi-material 3D printed with TPU and PLA.
Dexterous MCP Side Joint
The signature LEAP Hand MCP joint enables incredible dexterity side to side. In total LEAP Hand v2 has 21 DOF with 17 powered motors.
Articulated Palm
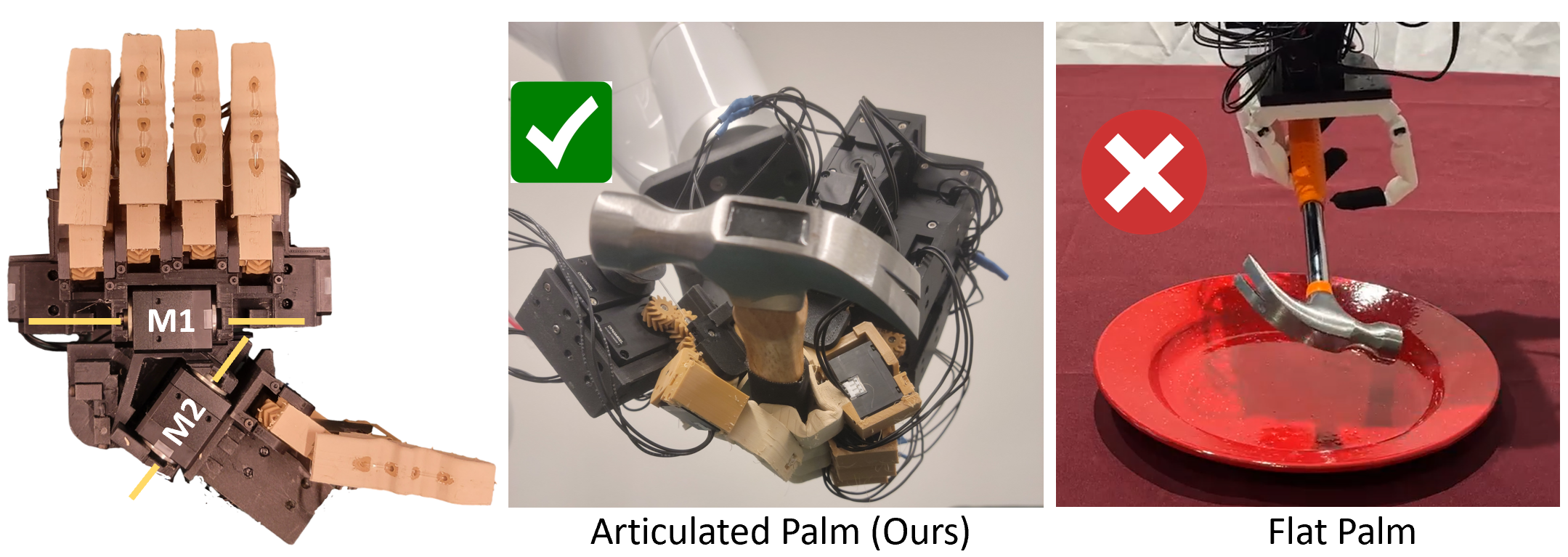
Two independently powered articulations in the palm enable LEAP V2 Adv to tightly grasp tools.
Cost and Assembly
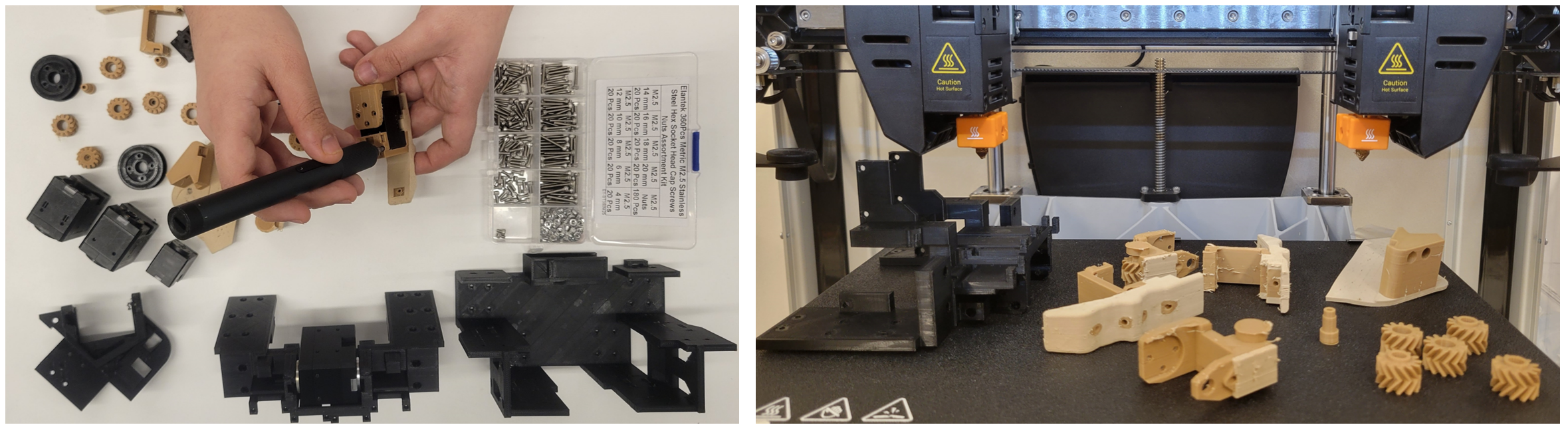
LEAP V2 Adv can be built within a day using our full instructions and is easy to repair.
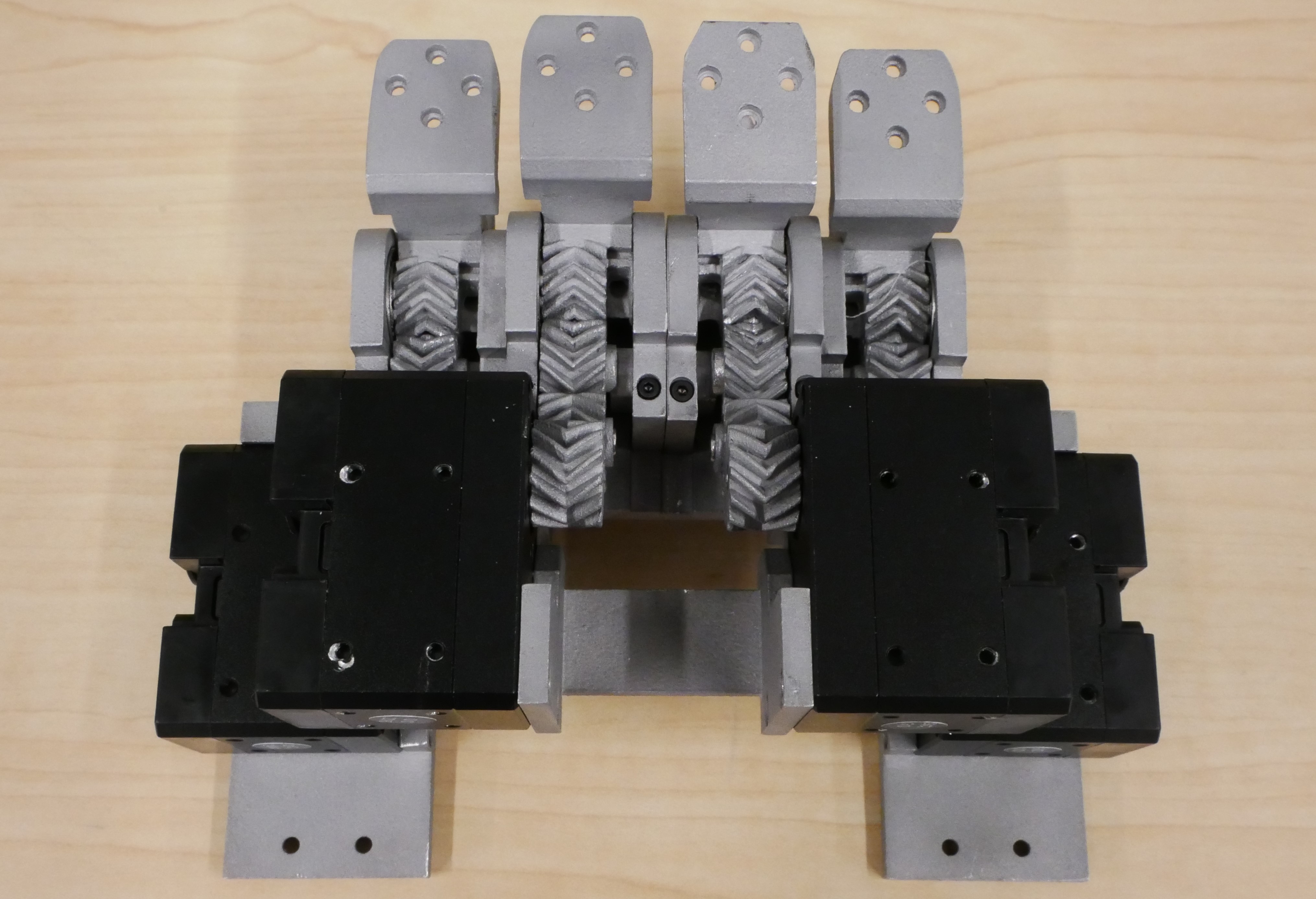
Human-like Kinematics
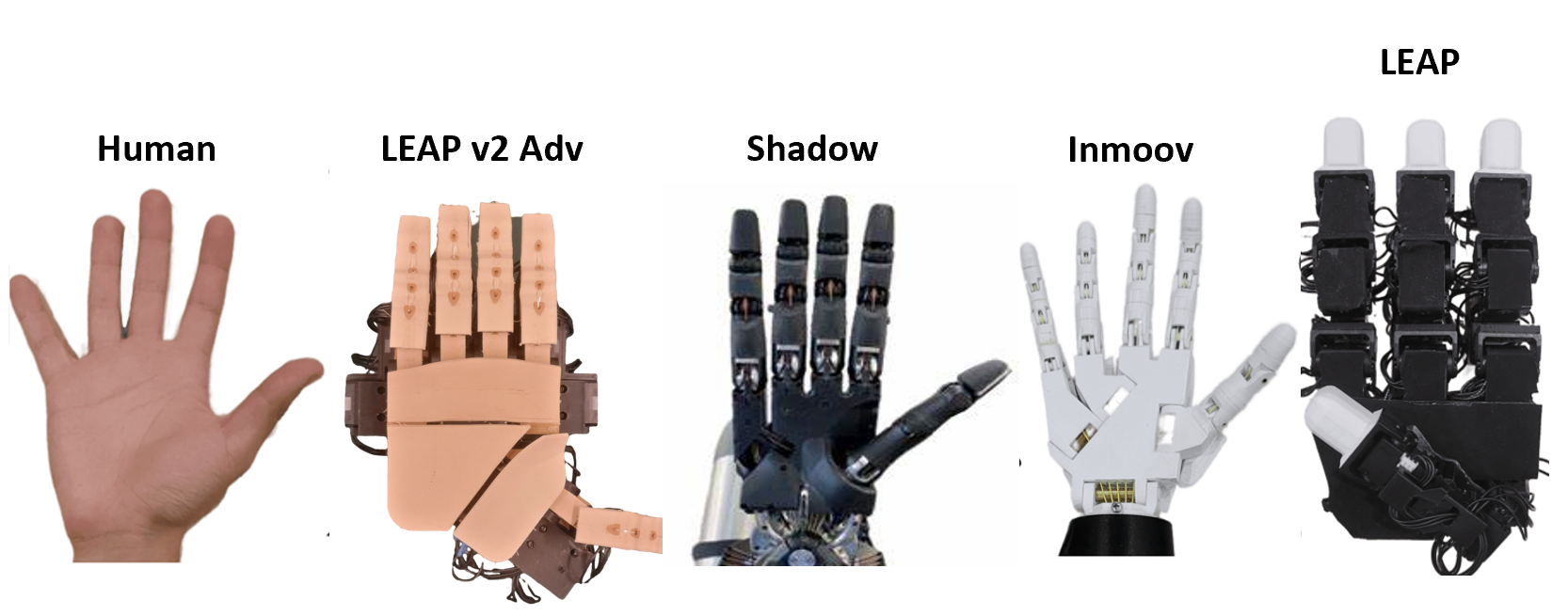
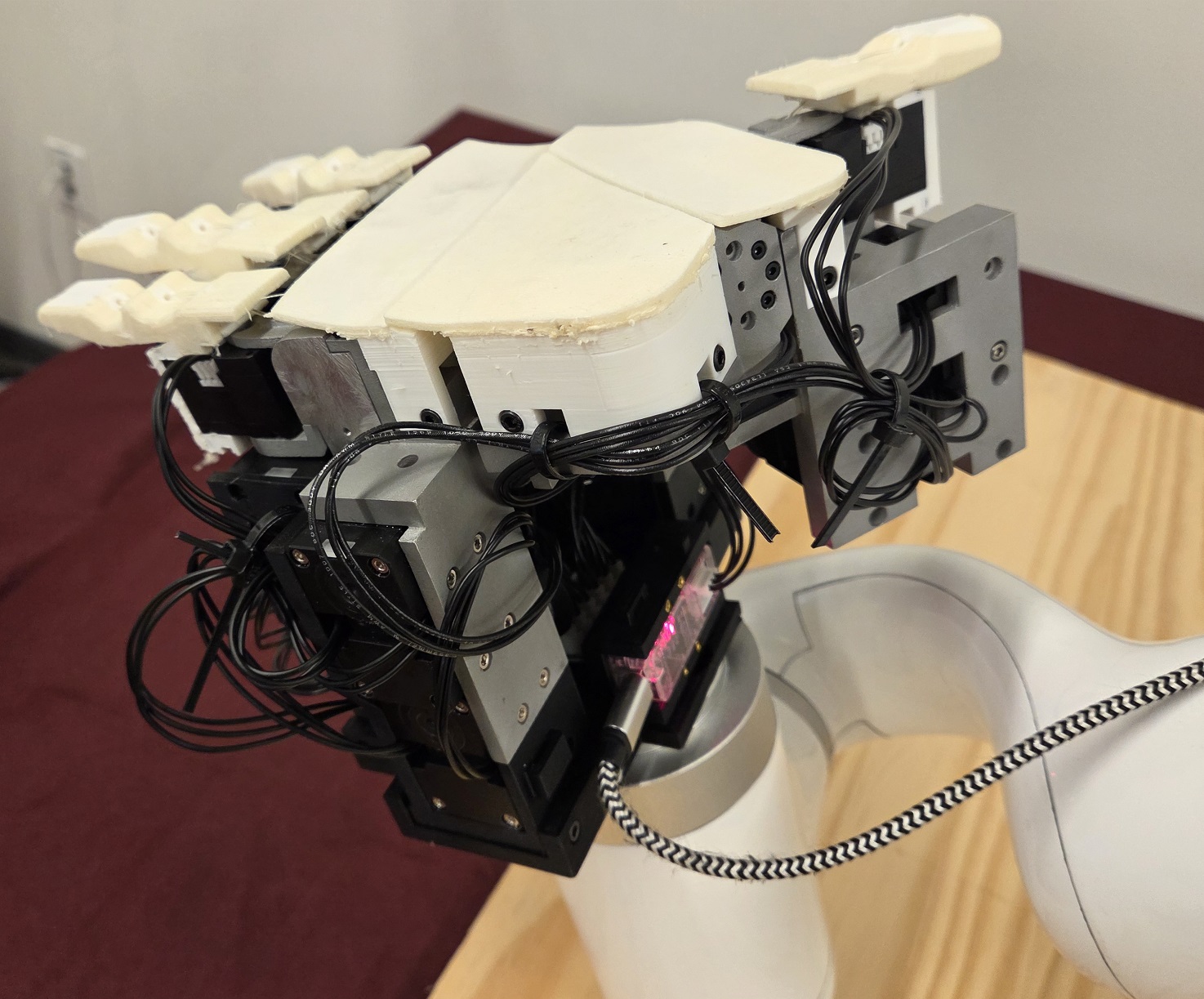
LEAP Hand v2 Adv has similar size of palm and kinematics to a human-hand. It mounts similarly to a gripper on any standard mid-size robot arm.
Human-like Kinematics